Робототехнический набор Двухколёсный Robot Car. Собираем роботов-самоходов на Arduino
Магазин роботов и робототехники бытовые роботы квадрокоптеры гироскутеры конструкторы роботы игрушки новости
 Я радуюсь, когда будущие инженеры создают свои устройства и расстраиваюсь, когда слышу, как кто-то говорит об использовании Arduino в них.
Я радуюсь, когда будущие инженеры создают свои устройства и расстраиваюсь, когда слышу, как кто-то говорит об использовании Arduino в них.
Это не первая моя статья на эту тему: у меня возникает желание написать такую сразу после прочтения фразы о безграничных возможностях платформы в DIY-топике на Хабре. У меня возникает желание написать об истинной цене деталей после прочтения статьи о покупке конструктора за $200 почти ничего не содержащего (уж простите, запамятовал где видел).
Дело тут совсем не в том, что я считаю, что Arduino – это плохая идея. Наоборот – благодаря платформе многие познали мир микроконтроллеров, узнали, что собрать небольшое прикольное устройство может даже человек без специального образования, с минимальными познаниями в программировании и с отсутствием познаний в электронике.
Благодаря Arduino увидело свет множество проектов, которые пылились в банках памяти мозга их авторов.
Честно признаюсь, я иногда и сам пользовался кодом, написанным для Ардуино (к примеру, фирма InvenSense производит модульMPU6050 , запустить нормально который получилось только у ).
Презираю я тех людей, которые, открыв для себя мир микроконтроллеров, не потрудились осмотреться в нём и тех, кто нагло наживается на подобных людях.
К нам в лабораторию заходил (и работал с нами) студент кафедры информационных технологий - поклонник Arduino. Человек тратил огромные деньги на покупку самих *дуин и модулей к ним. Я не без сожаления наблюдал, как будущий (я всё же надеюсь) создатель роботизированных систем не мог запустить ШИМ нужной частоты, хотя «лётных» часов работы с платформой он намотал немало.
Так вот, этот студент показал мне «измеритель уровня заряда батареи», или как-то так. Я специально нашёл его сейчас на ebay, где он называется «High Sensitivity Voltage Sensor Module -Arduino Compatible » и продаётся за $8.58 . Вот он, на рисунке:

Кстати, центральный провод, который «+» - он просто висит в воздухе – всё сделано для максимального удобного подключения простого делителя напряжения, красная цена которому 2 цента за резисторы и 20 центов за разьём – это если в розницу покупать.
Это не единственный случай обмана нашего брата, ниже я приведу ещё несколько. Сейчас же, для любителей структурирования, я напишу основные недостатки Arduino.

На Hobbyking, где любителей различных моделизмов обманывают так-же как и в других магазинах любителей ардуино, продавался как-то обычный конденсатор, под видом какого-то фильтра. Не смог его сейчас уже найти. С трёхпиновым разьёмом, естественно. Всего за 3 доллара.
Arduino Compatible Mini Motor Speed counter Sensor AVR PIC – заменяется светодиодом и фототранзистором, подключающимися к центральному контроллеру и двадцатью строчками кода. Он не стоит 7.98 .
2*4 Matrix Keyboard Push Buttons AVR ARM Arduino Compatible – это просто кнопки , которые можно купить по цене 10 штук за доллар.
Есть один девайс в мире, который я ненавижу больше чем Arduino – это mbed . Его разработчики взяли контроллер LPC1768 (есть ещё на LPC11U24), припаяли его на плату с двумя стабилизаторами (о качестве разводки платы я говорить не буду), вывели половину ног наружу (вторая половина никуда не подключена, что очень раздражает), написали онлайн недо-IDE (впрочем, чуть лучше, чем у Arduino, хоть и требует подключения к интернету) и продают его за $64. Простите, но это уже совсем.
Что делать, если вы, вдруг, решили перестать топтаться на месте, и начать изучать микроконтроллеры?
- На Хабре был цикл статей «STM32F1xx - лечимся от ардуинозависимости вместе » - статьи хорошие и достаточно понятные, жаль, что автор забросил написание новых статей.
- Всех новичков посылают на easyelectronics.ru, где товарищ DIHALT публиковал учебный курс по микроконтроллерам AVR .
- «Проектирование приложений на микроконтроллерах семейства 68HC12/HCS12 с применением языка С » С. Ф. Баррет, Д. Дж. Пак – супер книга, помогает понять основы программирования на C для микроконтроллеров. Единственная проблема – вы вряд ли достанете микроконтроллеры Freescale, поэтому примеры придётся самостоятельно портировать примеры на AVR, PIC, MSP430 или любой другой контроллер.
- Перед покупкой чего бы то не было для своих устройств, почитайте об этом хотя-бы в Википедии - возможно эту же деталь можно купить дешевле, если назвать её по-другому.
Вообще знаете, что странно? Среди пользователей Arduino есть даже те, кто презирают Apple за их «направленность на недалёкого занятого-для-таких-мелочей юзера».
Я не хочу никого обидеть или переубедить. Но я буду рад, если хоть один человек, дочитавший статью до этого момента, поменяет Arduino на простой микроконтроллер – может быть, из него получится хороший разработчик встраиваемых систем в будущем.
Библиографическое описание: Страковский Д. А., Симаков Е. Е. Создание робота-гонщика на платформе Arduino // Юный ученый. 2016. №3. С. 120-124..03.2019).
Цель работы: изучить принципы построения роботов на основе платы ArduinoUno. Создать действующую модель робота-гонщика и разработать алгоритм его поведения.
Задачи работы:
- Изучить особенности построения роботов на базе плат Arduino и их модулей.
- Изучить особенности среды программирования роботов на базе платформы Arduino.
- Создать модель робота-гонщика. Разработать алгоритм движения робота на базе анализа входной информации.
- Проанализировать работу робота.
Введение. Основы робототехники на платформе Arduino
Построение роботов с использованием любой технологии подразумевает изучение принципов работы специальных микросхем, которые называются микроконтроллерами. Они предназначены для управления электронными устройствами и представляют собой однокристальный компьютер, способный выполнять простые задачи. Контроллер, являясь «уменьшенной копией» компьютера, содержит все присущие ему основные модули: центральный процессор, оперативную память, flash-память, внешние устройства.
Рис. 1. Структура микроконтроллера
Для построения роботов используются различные платформы. В рамках проводимого исследования для разработки робота-гонщика была выбрана платформа Arduino. Первый прототип Arduino был разработан в 2005 году программистом Массимо Банци. На сегодняшний день платформа Arduino представлена не одной платой, а целым их семейством. Такой подход позволяет собирать всевозможные электронные устройства, работающие работать как автономно, так и в связке с компьютером. ПлатыArduino представляют собой наборы, состоящие из готового электронного блока и программного обеспечения. Электронный блок - это печатная плата с установленным микроконтроллером. Фактически электронный блок Arduino является аналогом материнской платы компьютера. На нем имеются разъемы для подключения внешних устройств, а также разъем для связи с компьютером, по которому осуществляется программирование.
Самой популярной и наиболее универсальной платформой семейства является плата ArduinoUno. Она выполнена на базе процессора с тактовой частотой 16 МГц, обладает памятью 32кБ, два из которых выделено под загрузчик, позволяющий прошивать Arduino с обычного компьютера через USB. Также имеется 2 кБ SRAM-памяти, которые используются для хранения временных данных (это оперативная память платформы) и 1кБ EEPROM-памяти для долговременного хранения данных (аналог жёсткого диска).
На платформе расположены 14 контактов, которые могут быть использованы для цифрового ввода и вывода. Какую роль исполняет каждый контакт, зависит от программы. Некоторые контакты обладают дополнительными ролями. Например, Serial 0-й и 1-й - используются для приёма и передачи данных по USB; LED 13-й - к этому контакту подключен встроенный в плату светодиод. Также имеется 6 контактов аналогового ввода и входной контакт Reset для сброса.


Рис. 2. Плата ArduinoUno
Отличительной особенностью Arduino является наличие плат расширения, так называемых, «шилдов». Это дополнительные платы, которые ставятся подобно «слоям бутерброда» поверх Arduino, чтобы дать ему новые возможности. Shield подключаются к Arduino с помощью имеющихся на них штыревых разъемов. Рассмотрим подробнее Shield, которые использовались при проведении исследования:
‒ MotorShield - обеспечивает управление двигателями постоянного тока. Выводы микроконтроллера являются слаботочными, поэтому ток мотора, при подключении его напрямую, выведет их из строя. Эту проблему решает так называемый H-мост. Он позволяет управлять скоростью и направлением вращения мотора.
‒ TroykaShield - помогает подключать большое количество периферии вроде сенсоров через стандартные 3-проводные шлейфы. Для принятия решения о направлении дальнейшего движения разрабатываемого робота использовались цифровые датчики линии, подключаемые к данному «шилду». Эти датчики позволяют определять цвет поверхности около него. Выходом является простой цифровой сигнал: логический 0 или 1 в зависимости от цвета, который он видит перед собой. Единица - чёрный или пустота, ноль - не чёрный.


Рис. 3. Motor Shield и Troyka Shield
Разработка приложений на базе плат Arduino осуществляется в специальной среде программирования Arduino IDE. Среда предназначена для написания и загрузки собственных программ в память микроконтроллера. Среда разработки Arduino состоит из редактора программного кода, области сообщений, окна вывода текста, панели инструментов и панели меню.
Базовая структура программы для Arduino состоит из двух обязательных частей: функций setup() и loop(). Перед функцией setup() идет объявление переменных, подключение вспомогательных библиотек. Функция setup() запускается один раз после каждого включения питания или сброса платы. Она используется для инициализации переменных, установки режима работы портов и т. д. Функция loop() в бесконечном цикле последовательно исполняет описанные команды. Для взаимодействия с различными устройствами, для обеспечения ввода и вывода используются специализированные процедуры и функции.
Сборка робота-гонщика на платформе Arduino
Рассмотрим практическую часть проекта - создание робота гонщика. Для этого использовались плата ArduinoUno, «шилды», описанные выше, датчики линии, микромоторы с редуктором, колеса, балансировочные шары. Процесс построения модели робота можно разделить на несколько этапов.
Этап I . Сборка платформы. Вначале необходимо собрать основу робота - подвижную платформу. Колеса крепятся к моторам, а затем к установочной платформе. Для поддержания равновесия платформы используются балансировочные шары. Один устанавливается снизу с тыльной стороны платформы. Этот шар играет роль третьего колеса и опоры одновременно. Второй шар, при необходимости, может быть использован в качестве балласта. Датчики линии устанавливаются спереди платформы.
Этап II . Установка платы Arduino и подключение моторов. Плата ArduinoUno крепится с тыльной стороны. Такое расположение позволит обеспечить корректное расположение платформы при движении. Сверху на плату устанавливается MotorShield, к которому подключаются моторы.
Этап III . Установка Troyka Shield и подключение датчиков. Следующий «шилд» устанавливается поверх предыдущего, образуя своеобразный «бутерброд». Цифровые датчики линии подключается к 8 и 9 контактам «шилда»
Этап IV . Балансировка. На заключительном этапе сборки необходимо закрепить провода на платформе, чтобы они не мешали движению робота. Также можно установить дополнительные балансировочные шары, учитывая при этом вес всех плат и батареи.

Рис. 4. Робот гонщик в сборке
Разработка алгоритма поведения робота
Далее необходимо разработать алгоритм движения робота на основании показаний датчиков. Основная идея заключается в следующем. Пусть у нас есть белое поле и на нём чёрным нарисован «дорога» для робота (трек). Используемые датчики линии выдают логический ноль, когда «видят» чёрное и единицу, когда «видят» белое. На прямой робот должен пропускать трек между сенсоров, т. е. оба сенсора должны показывать «1». При повороте траектории направо правый сенсор наезжает на трек и начинает показывать логический ноль. При повороте налево ноль показывает левый сенсор.
При тестировании робота возникла проблема инертности, а именно: робот вылетает с трека, не успевая отреагировать на поворот. Это связано с тем, что моторчики не умеют тормозить мгновенно. Решить эту проблему можно следующим образом. После того, как сенсоры улавливают поворот, нужно остановиться и вернуться назад на некоторое расстояние, зависящее от скорости перед остановкой. Таким образом, необходимо найти зависимость пройденного расстояния при заднем ходе от времени. Для этого была проведена серия тестовых заездов. В результате анализа полученных данных такая зависимость была найдена. Это позволило вычислить, какое расстояния необходимо проехать роботу назад, исходя из величины скорости перед остановкой.
Однако, роботу не обязательно останавливаться перед каждым поворотом - на маленькой скорости он прекрасно вписывается в поворот и без дополнительных действий. Кроме того, чтобы ускорить процесс поворота, «сдавать назад» можно не по прямой, а под некоторым углом. Также необходимо различать состояния робота - когда он движется по прямой, а когда входит в поворот. В первом случае можно увеличивать скорость робота для более динамичного прохождения трека, во втором - сбрасывать скорость до значения, достаточного для успешного прохождения поворота.

Рис. 5. Поиск зависимости пройденного расстояния при заднем ходе от времени
Перечисленные положения стали основой для разработки усовершенствованного алгоритма поведения робота.
Заключение
В данном исследовании были рассмотрены основы проектирования роботов на базе платформ семейства Arduino, а также построена действующая модель робота на основе платы ArduinoUno. В ходе тестирования были выявлены и устранены некоторые недостатки как технической части, так и алгоритма движения. Полученная модель способная корректно воспринимать поступающую информацию о местонахождении робота и, анализируя ситуацию, принимать решение о дальнейшем движении. Существует несколько направлений модификации данной модели:
‒ Можно поэкспериментировать с системой грузов и добиться идеального равновесия.
‒ Расположение и количество сенсоров также являются значительными параметрами в данной конструкции. От этого напрямую зависит не только та скорость, с которой робот будет реагировать на повороты, но и конструкции треков, по которым он сможет корректно передвигаться.
Однако наиболее актуальным и оптимальным решением может стать использование нейросетей. С их помощью робот, несколько раз неудачно пройдя поворот, обучится и не повторит такой ошибки в следующий раз. Это будет работать и с другими действиями, совершаемыми роботом, что позволит, со временем, создать идеально приспособленного к любым трассам гонщика.
Работа по изучению и применению на практике полученных результатов данного исследования будет продолжена. В дальнейшем планируется расширить полученные знания и предпринять попытку построить самообучающегося робота, что позволит решить некоторые проблемы, рассмотренные в рамках данного исследования.
Литература:
- Блум Д. Изучаем Arduino. - СПб.: БХВ-Петербург, 2015.
- Петин В. А. Проекты с использованием контроллера Arduino. - СПб.: БХВ-Петербург, 2014.
- Соммер У. Программирование микроконтроллерных плат Arduino/Freeduino. - СПб.: БХВ-Петербург, 2012.
- Терехов С. А. Лекции по теории и приложениям искусственных нейронных сетей. - Снежинск: ВНИИТФ, 2003.
- Уоссермен Ф. Нейрокомпьютерная техника: Теория и практика. - М.: Мир, 1992.
- Амперка. Вики [Электронный ресурс].
- URL: http://wiki.amperka.ru/ (Дата обращения: 3.10.2015г.)
- Информационный портал RoboCraft [Электронный ресурс].
- URL:http://robocraft.ru/page/summary (Дата обращения: 12.11.2015г.)
- Информационный портал Arduino.ru [Электронный ресурс].
- URL:http://arduino.ru/ (Дата обращения: 14.11.2015г.)
Ключевые слова: робототехника, программирование, искусственный интеллект. .
Аннотация: Сегодня сложно представить мир без роботов. Робототехника является эффективным методом для изучения важных областей науки, технологии, конструирования, математики. На сегодняшний день невозможно говорить о роботах и не затрагивать такое понятие, как искусственный интеллект. Эти два направления тесно связаны. Автором ранее была проведена работа по изучению нейронных сетей, а также возможности «роботизирования» некоторых аспектов человеческой жизни. Данная статья посвящена рассмотрению вопросов робототехники.
В этой статье мы займемся постройкой своего робота с нуля. То, что у нас получится, смотрите на фото ниже. Робот будет ездить как самостоятельно, так и под управлением смартфона. А еще мы рассмотрим постройку своего мобильного робота с нуля.
3 D принтер
Если я хочу построить робота я должен определиться с выбором платформы, на которую я буду устанавливать двигатели, платы, аккумуляторы. Я, конечно, могу приобрести готовый вариант, но интереснее сделать платформу самому. Такая платформа точно будет соответствовать вашим требованиям. Платформу можно сделать из орг. Стекла, фанеры, а я сделаю ее из пластика.
Вы можете сказать, что платформу самому делать неудобно и потребуется множество инструментов, начиная от кернера и заканчивая шлифовальным станком. А я говорю, что нам понадобится воображение и 3D принтер.

3D принтер? Всем, наверное, знаком обычный офисный принтер, который может распечатать на А4 нужный нам текст. Так вот, 3D принтер – это принтер, который может распечатать нужную деталь. Есть разные 3d принтеры. У меня принтер с технологией FDM (послойное наплавление). Какие еще есть технологии 3d печати, можно узнать в интернете.
Многие 3D принтеры работают на Arduino. При желании, можно собрать свой 3D принтер. Главная идея 3D принтера в том, что можно печатать абсолютно любую вещь, мы же напечатаем корпус для робота.
Для начала определимся с описанием платформы. Я хочу, чтобы платформа была двухколесной и в нее должны помещаться Arduino, питание, моторы и несколько датчиков.
Теперь нужно нарисовать макет платформы на бумаге и разместить на ней нужные компоненты. Например, вот так.

Когда макет будет готов, нужно будет сделать 3D модель платформы. Для этого существует множество программ. Я, обычно, пользуюсь . Я не буду учить работать с Компасом, но если вам интересно, можете посмотреть в интернете или попросить в комментариях сделать урок по Компасу.
Вот такая платформа получилась у меня.

После этого нужно преобразовать 3D модель в G-код, понятный 3d принтеру. Для этого существуют специальные программы - слайсеры. Я использую программу Repetier-Host со слайсером Sli3er. Вот как выглядит деталь, готовая к распечатке.
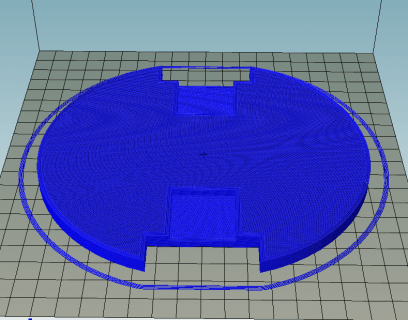
А вот распечатанная модель.

Только недавно у нас была идея, а готовая деталь уже перед нами. С помощью 3D принтера можно создавать уникальные вещи в единичных экземплярах. 3D принтер – классная штука. Советую всем!
Моторы
Теперь нужно подумать о том, как наш мобильный робот будет двигаться. Первое, что приходит на ум – колеса. Так и поступим.
Если кто помнит, мы уже пробовали подключать мотор к Arduino. Кто не помнит, не знает или не читал – смотрим . В подключении мотора с помощью MOSFET есть существенные недостатки – невозможно оперативно менять скорость и направление вращения. Пришло время научить Arduino управлять моторчиками по-настоящему!
Для этого можно использовать микросхему L293D. L293D позволяет управлять сразу двумя моторами, с током 600 мА на канал и пиковым до 1000 мА, а если объединить каналы – то до 1200 мА и 2000 мА пикового тока. Про объединение расскажу ниже.
Для начала, как всегда, следует посмотреть на Datasheet, чтобы разобраться, куда и что подключать. Если вы не знаете о микросхемах, то стоит прочитать статью.
Приступим. Соберем простенькую схему с одним мотором и порулим им. Внимание на схему сборки.
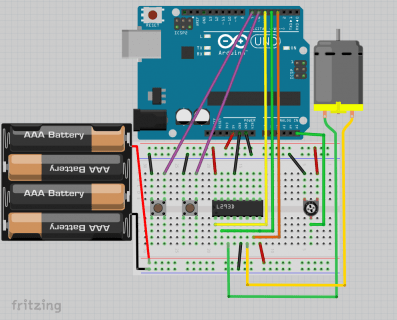
Если не знаете английский или просто не разобрались в Datasheet, то вот описание подключения. Нумерацию микросхем, надеюсь, все знают или узнали из статьи про микросхемы.
- Пин 1 – Отвечает за скорость вращения мотора. Аналогичный - на пине 9. Принимает значения от 0 до 255, что без проблем можно организовать с помощью PWM.Я подсоединил EN к пятому пину Arduino, который поддерживает PWM.
- Пины 2 и 7 – Отвечают за направление движения мотора. Аналогичные - на пинах 10 и 15. Подача логической единицы на один из этих пинов заставит мотор крутиться в одну сторону (зависит от подключения мотора), подача логической единицы на другой – заставит мотор крутиться в обратную сторону.
- Пины 3 и 6 – К ним нужно подключать мотор. Полярность не важна, от подключения будет зависеть только направление вращения. Аналогичные - на пинах 11 и 14.
- Пины 4 и 5 – Это земля. Думаю, не нуждается в пояснении. Аналогичные – 12 и 13.
- Пин 8 – Питание для моторов. На него нужно подать питание в диапазоне от 4.5 до 36 Вольт
- Пин 16 – на него подается логическая единица с Arduino. 5 Вольт, если что.
Отлично! Мотор подключили. Теперь можно и покодить.
#define FRW_BUT 7 //Кнопка "вперед" #define BCW_BUT 6 //Кнопка "назад" #define SPD 5 //Управление скоростью вращения... #define FRW 4 //...направлением вращения(вперед)... #define BCW 3 //...направлением вращения(назад) #define SPD_POT A5 int xspeed = 0; //Переменная для определения скорости вращения мотора int frw_move = 0; //Переменная для команды "вперед" int bcw_move = 0; //Переменная для команды "назад" void setup() { //Обозначаем пины pinMode(SPD, OUTPUT); pinMode(FRW, OUTPUT); pinMode(BCW, OUTPUT); pinMode(SPD_POT, INPUT); pinMode(FRW_BUT, INPUT_PULLUP); pinMode(BCW_BUT, INPUT_PULLUP); } void loop() { //Считываем показания с потенциометра //и приводим их в нужный диапазон - от 0 до 255 //После - передаем на пин регулировки скорости xspeed = analogRead(SPD_POT); constrain(xspeed, 0, 1023); xspeed = map(xspeed, 0, 1023, 0, 255); //Определяем нажатие кнопки "вперед" if(!digitalRead(FRW_BUT)) { frw_move = 1; } else { frw_move = 0; } //Определяем нажатие кнопки "назад" if(!digitalRead(BCW_BUT)) { bcw_move = 1; } else { bcw_move = 0; } //Вызываем функцию по отправке данных на L293D motor(); } void motor() { //Отправляем данные на L293D analogWrite(SPD, xspeed); digitalWrite(FRW, frw_move); digitalWrite(BCW,bcw_move); }
Как работает? Работает просто. При нажатии на левую кнопку колесо крутится в одну сторону, а при нажатии на правую – в другую. Поворотом ручки потенциометра можно регулировать скорость вращения моторчика. Действие нашей испытательной установки для моторчиков показано на видео.
З.Ы. Да, знаю, что качество видео не супер, но постараюсь найти нормальную камеру и организовать место для съемки как можно скорее.
Теперь про соединение каналов L293. Если хочется подключить более мощный моторчик, то можно объединить каналы.
Первый способ – параллельно соединить аналогичные выводы микросхемы, что даст прибавку к максимальной силе тока в два раза. Минус – к одной микросхеме можно подключить только один моторчик.
Второй способ – сверху на L293 напаять другую L293. Берем и напаиваем пин 1 к пину 1, пин 2 к пину 2 и так далее. Этот способ так же дает прибавку к силе тока в два раза, но, в отличие от первого – оставляет возможность управлять сразу двумя моторчиками. У вас может возникнуть идея – а не напаять ли мне еще парочку L293? К сожалению, последующая напайка микросхем не приведет к увеличению силы тока еще на 600 мА. Прибавка будет незначительна.
“Э-эх, придется убирать мой 12-Вольтовый мотор… “ Не спешите расстраиваться. Для более мощных моторов подойдет старший брат L293 - L298, но сейчас мы не будем его рассматривать. Это мы сделаем чуть позже.
Motor Shield
Согласитесь, что с таким пучком проводов выглядит это все не очень. Чтобы избавиться от него можно спаять схему с L293 на печатной или макетной плате для пайки, но что делать, если паять не хочется или не умеется? Для этого существуют готовые решения в виде шилдов для Arduino, например. Я расскажу про один из них – Motor Shield V1 от DK Electronics.
Вот, собственно, фото шилд.
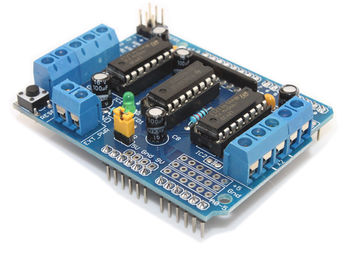
На этом шилде установлены две L293D, что позволяет управлять сразу четырьмя моторами. Еще там есть два контакта для сервомоторов. Питание подается либо на клемник, либо, при установленной перемычке, с питания Arduino. Перемычка так же позволяет брать питание для Arduino с шилда. Для работы с этим шилдом существует специальная библиотека. Скачать ее можно .
К минусам платы. Для работы с шилдом используются почти все цифровые пины, кроме 0, 1, 2, 13. Как мы знаем, пины 0 и 1 используются Arduino для прошивки, поэтому их лучше не использовать.
Есть тут и хорошая сторона. Если не подключать сервы, например, освобождаются пины 9 и 10, а если не использовать какой-либо из моторов, то освободятся пины 3, 5, 6, 11, в зависимости от неиспользуемого мотора. И еще. Нам остаются доступны шесть аналоговых выходов, которые при желании можно использовать как цифровые.
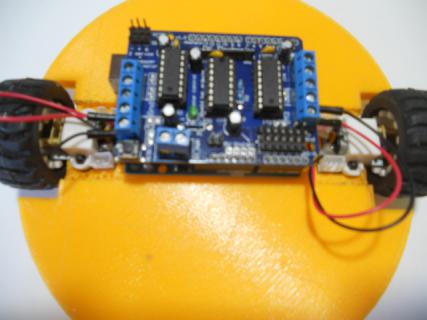
Начнем подключение моторов. Ради эксперимента сделаем робота, который ездит вперед, назад, а также вращается вокруг собственной оси. В качестве платформы я взял собственную разработку, описанную выше. Вы можете взять, что душе угодно, главное – подходящее по характеристикам.
Нам понадобятся

- Arduino UNO – Можно использовать любую другую форм фактора Arduino UNO. Leonardo или Iskra, например.
- Motor Shield – Подойдут и другие версии этого шилда.
- Моторчики на 6В – Можно взять любые, подходящие по характеристикам к Motor Shield.
- Колеса диаметром 42мм – Колеса подходящие к моторчикам и платформе
- Крепления для моторчиков – Моторчики нужно прикрепить к платформе. Возьмите подходящие к вашей.
- Питание – Я взял блок аккумуляторов и получил на выходе около 5 Вольт, что недостаточно для питания моторов и Arduino, поэтому я подключил DC/DC преобразователь и поднял напряжение до 9В. Если нет преобразователя, то можно воспользоваться обычной кроной, подключив ее к питанию Arduino.
Пришло время собрать нашего робота.
Шаг 1
Соединяем Arduino и Motor Shield.

Шаг 2
Собираем моторы и прикручиваем их на платформу.

Шаг 3
Собираем питание через повышающий преобразователь.

Для тех, у кого Крона. Не забудьте перемычку!

Шаг 4
Прикручиваем моторы к Motor шилду с Arduino.
Шаг 5
Добавляем питание.

Шаг 6 (Опционально)
Прикрепим крышку – для эстетики.

У нас есть готовый робот. Теперь пришло время его запрограммировать. Смотрим на код.
//Подключаем библиотеку для работы с Motor Shield
#include
Отлично! Время проверять. Вот видео с моей проверки. А у вас как?
“Ты что-то говорил про робототехнические платы?” – могут сказать те, кто читал вводный урок 2 части курcа. Да, такие платы есть. Рассмотрим робототехническую платформу Strela.
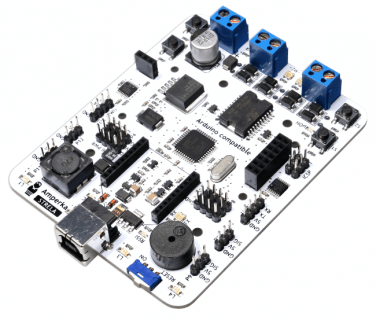
Мечта робототехника. (Почти). Преимущества платы я описывал . Сразу к делу.
На ней- то и установлен старший брат L293 – L298. А еще пины выведены тройками, что как раз подходит для подключения многих датчиков.
Эту плату можно подключить вместо Arduino UNO и Motor Shield. Кроме того, ребята из Амперки написали библиотеку для работы со Стрелой, что делает управление моторами достаточно тривиальной задачей.
Для тех, кто не знал, рассказываю. К каждой нормальной библиотеке существуют примеры по ее использованию и библиотека для Стрелы не исключение. Для того чтобы их найти, заходим во вкладку Файл -> Примеры -> Strela. Там выбираем пример StrelaMotors, где выполняется скетч, похожий на скетч с использованием Motor Shield. Кстати, к Motor Shield тоже есть примеры. Если интересно – смотрите.
Что еще можно сделать со Стрелой – смотрите ниже.А мы переходим к беспроводной связи по Bluetooth.
Bluetooth
Робот, который сам ездит по комнате это, конечно, хорошо, но хотелось бы порулить роботом самостоятельно. Для этого нужно организовать связь между Arduino и управляющим устройством.
В качестве управляющего устройства я выбрал смартфон. Связь мы будем организовывать по протоколу Bluetooth, поэтому пришло время знакомиться.

Это модуль HC-06. Я не буду особо вдаваться в подробности, но кому интересно, переходим . Наша цель – порулить роботом со смартфона. Начнем, пожалуй.
Для начала нужно подключить HC-06 к Arduino. Подключение будем осуществлять при помощи Software Serial. Эта библиотека позволяет эмулировать Serial Port на нужных нам пинах. Ради эксперимента попробуем сделать это на пинах A0(RX) и A1(TX). Зачем? Помним, что я рассказывал про Motor Shield.
Подключаем так:
- Vcc – к 5V
- GND – к GND
- RX – к TX
- TX – к RX

Я подключу HC-06 к роботу, которого мы собирали выше. Для этого воспользуемся тремя полосами на Motor Shield.

Робот готов. Осталось его запрограммировать.
Прежде чем читать код, вы должны кое-что узнать. Моторы не идеальны, как и все в этом мире. Даже два мотора из одной партии, идущие друг за другом, будут немного отличаться, что скажется на разнице в количестве оборотов при одном и том же напряжении. Если моторы просто подключить к motor Shield и подать на них одинаковую скорость, а это и есть одинаковое напряжение, то робот поедет не прямо, а немного, или много, в сторону. Это можно увидеть в видео выше.
Для того чтобы этого избежать, мы будем применять корректировочные коэффициенты. У меня левое колесо крутится намного быстрее, чем правое, поэтому я поставил коэффициент 0.62 для компенсации. Значение коэффициента подбирается экспериментальным путем.
// Подключаем библиотеки для работы с Motor Shield и Software Serial
#include
Робота прошили. Теперь займемся смартфоном.
RC controller
Для связи Arduino и смартфона через Bluetooth есть множество различных приложений. В поиске ключевыми словами будут: Arduino, Bluetooth, RC.
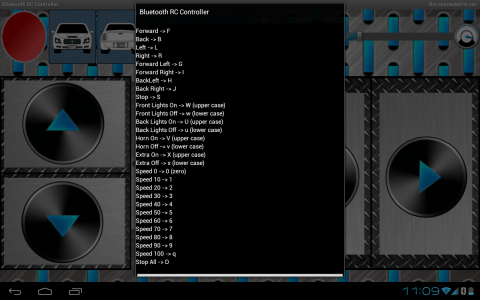
Я выбрал приложение под названием Bluetooth RC Controller. Оно идеально подойдет для нашей цели. При нажатии на кнопку приложение отправляет значение типа char на HC-06, который, в свою очередь, передает пришедшее значение Arduino. Значение, отправляемое при нажатии кнопки, устанавливается самостоятельно.

Чтобы установить соединение с роботом, нужно нажать на шестерню и выбрать пункт “Settings” В “Settings” нужно убедиться, что кнопки соответствуют этим отсылаемым символам, либо изменяем код Arduino.
После настройки символов можно устанавливать соединение с HC-06. Жмем на шестерню и заходим в “Connect to car” Открывается окно с сопряженными устройствами. В нем выбираем HC-06. Если его нет, то ищем с помощью “Scan for devices”. Если устройство найдено, но не хочет сопрягаться, то заходим в Bluetooth на смартфоне и сопрягаем, как обычно. Пароль стандартный – 1234. После этого заходим в “Scan for devices” и соединяемся.
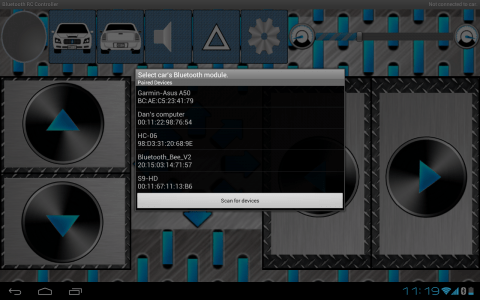
Когда соединение установится, загорится зеленый огонек сверху, а HC-06 перестанет моргать. Можно начинать рулить. Полоска сверху отвечает за скорость движения.
Вернемся к Стреле. Еще одним преимуществом Стрелы является возможность установить Bluetooth XBee формата, а хорошо это тем, что другие пины остаются свободными. А так как для Стрелы есть готовая библиотека, которая помогает сократить код для управления моторами, то использовать Стрелу для управления роботом по Bluetooth очень даже стоит.
Для этого нужно подключить XBee к Стреле, прошить ее скетчем из примеров под названием “ArduinoBluetoothRCCarOnStrela” и подключиться к XBee через RC controller.
Советы
Робот у меня готов и даже ездит по команде со смартфона. Но не все может пройти гладко. Я расскажу о некоторых проблемах и их решениях, а также дам несколько советов начинающим робототехникам.
Колеса крутятся не в те стороны, в какие хотелось бы – эта проблема легко устраняется путем перестановки проводов в клемниках или программно.
Bluetooth модуль не работает – нужно проверить наличие горящего красного светодиода на модуле. Если он не горит, то проверить правильность подключения Bluetooth модуля. Если светодиод горит, но соединение ну устанавливается, нужно убедиться в том, что RX модуля соединен с TX платы и наоборот, а так же попробовать способ с сопряжением модуля с Arduino через стандартный Bluetooth интерфейс.
Робот не едет прямо – я описывал эту проблему чуть выше, когда рассказывал про Bluetooth и Motor Shield.
При езде робот неожиданно останавливается и теряется соединение с HC-06 – проблема в источнике питания. Мы знаем, что Arduino нужно не менее 7В для стабильной работы, а еще мы знаем, что моторчики очень хорошо кушают. Если поднести щупы мультиметра к клеммникам подачи напряжения и измерить напряжение при выключенных моторах, а потом их включить, то можно увидеть, что напряжение на мультиметре упадет. Причем упасть напряжение может по-разному.
Если подключен источник питания, который не может обеспечить достаточный ток для моторов, то напряжение может упасть сильно, с 9 до 5 Вольт, например, а 5В уже не будет хватать для Arduino и она перезапустится. Решение – подключить более мощное питание. Как рассчитать, я расскажу ниже.
Если подключить источник питания мощнее, то просадка напряжения может быть только в течение нескольких миллисекунд, но и их может оказаться достаточно для перезапуска контроллера. Решение – параллельно проводам питания установить конденсатор не менее чем на 1000мкФ, емкость можно определить экспериментально. Я ставил конденсатор на 3300 мкФ и на 16В. Не забываем смотреть на максимальное напряжение конденсатора.
Когда источник питания достаточно мощный, просадки напряжения не более 0.2В.
Несколько советов для начинающих робототехников
Начиная планировку робота, первым делом желательно позаботиться о расчёте мощности силовой части и подборе соответствующего источника питания. Будет обидно, если 4 батарейки ААА не потянут твои 4 6-вольтовых мотора, а места для более источника питания не останется.
Для расчета мощности ищем характеристики моторов, плат, датчиков. Из курса физики знаем, что мощность можно рассчитать по формуле P = IU, где I – сила тока, U – напряжение. С помощью этой формулы и характеристик легко рассчитать потребляемую мощность готового устройства, а зная потребляемую мощность и рабочее напряжение питания, можно узнать оптимальную силу тока, необходимую для работы устройства, зная силу тока, можно определиться с необходимой емкостью аккумулятора и время работы устройства от выбранного аккумулятора.
Как я и говорил, всегда следует ставить конкретную цель, при достижении которой проект можно считать выполненным. В этой мысли есть нюансы. Если проект достаточно большой, то добраться до цели не так-то просто, особенно, когда пишешь код. Написал я однажды большой код, думал - «Вот сейчас напишу все и проверю! », при попытке скомпилировать код, он не сразу скомпилировался, так как было несколько ошибок. Ошибки я убрал, да вот только код не работал, как я хотел. Пришлось переписывать все почти с нуля, понемногу добавляя код и проверяя на работоспособность получившийся код. Так советую поступить и вам.
Если есть цель сделать “пароль” из трех символов, то не стоит программировать все три сразу. Лучше сделать пароль из одного символа, проверить его, потом из двух, а после проверки – из трех. Мне помогает.
Робот создается методом проб и ошибок. Не получится один раз запрограммировать, чтобы действие выполнялось идеально. Те же подстроечные коэффициенты на колесах, поэтому не стоит опускать руки если что-то не получается, а если совсем-совсем не получается, то можно обратиться к добрым людям на форумы или написать мне, обязательно поможем!
Заключение
Робототехника – классная штука! В скором времени, я думаю, роботы займут, а то и уже заняли место в жизни людей. Мы сделали простейшего робота-машинку с управлением со смартфона, позже займемся более серьезными проектами, ну а пока – до скорого!
Заключительная часть статьи о маленьком роботе, которого мы собираем на шасси - крышке от пластикового контейнера для еды. Мозгом нашего робота является плата Arduino UNO, двигателями и сервоприводом управляет плата Driver Motor Shield, датчик препятствий - Ультразвуковой сонар - глазки как у Валли (из мультика) - «HC-SR04 Ultrasonic Sensor». , . Как создать робота на Arduino?
9. Подключение батареи и моторов
При подключении батареи нужно быть абсолютно уверенным в правильности соблюдения полярности, как говорится 7 раз отмерь, один раз подключи. Старайтесь соблюдать такое правило - красны провод всегда к + питания, черный провод - земля, он же минус, он же GND. Производители стараются соблюдать такие же правила. Поэтому провода идущие от аккумуляторного отсека подсоединяем к колодке +M и GND, на плате управления двигателями. Провода от ходовых двигателей подключаем к колодкам M1, M2 платы управления двигателями. Левая сторона, по ходу движения подсоединяется к колодке M1, правая сторона к колодке M2. По поводу полярности двигателей пока волноваться не стоит, её можно будет поменять, если во время теста пойдёт что то не так.
10. Проверяем полярность и правильность соединения модулей
Очень важный и ответственный момент сборки микроробота - проверка правильности монтажа, соединений, модулей согласно блок схеме, смотрим маркировку на платах, проверяем с помощью тестера, полярность питания, у кого есть тестер.
11. Этап программирования Arduino
Программа в микроконтроллер Arduino заливается из компьютера, посредством USB кабеля и специальной программы - среды программирования и редактирования скетчей (программ) - Arduino IDE. Взять программу можно с сайта arduino.cc, раздел Download, там всегда можно скачать последнюю, самую свежую версию программы. После того как среда программирования установлена остаётся только выбрать из меню программы драйвера для какой платы вы хотите использовать, - в нашем случае Arduino UNO, и COM порт через который посредством эмуляции USB подключена Arduino. На этот счёт очень много всяческих мануалов, поэтому этот этап мы пропускаем (на всякий случай - меню Tools > Serial Port) .

Программу для микро робота можно с нашего сайта, правда только после регистрации, шутка Мини робот на Arduino. Для того чтобы программа заработала необходимы дополнительные библиотеки - AFMotor.h, Sevo.h, NewPing.h, все они есть в архиве, вам необходимо распаковать архив в папку установленной программы Arduino IDE. У меня -это директория c:Program Files (x86)Arduino, библиотеки нужно положить в папку c:Program Files (x86)Arduinolibraries. Затем войти в директорию c:Program Files (x86)ArduinolibrariesAPC_4_ROBOT и два раза щёлкнуть мышкой по APC_4_ROBOT.ino это и есть сам скетч, затем запустится среда программирования. Подсоединяем голую плату Arduino Uno (это значит без подключенных модулей) через шнур USB к компьютеру, жмём кнопку со стрелочкой в право, программа начнёт заливаться в контроллер. Весь процесс занимает несколько секунд, и если всё правильно подсоединено, то не должно загораться никаких красных надписей, а индикатор в нижнем правом углу закончит свое движение на 100%. Программа для Arduino установлена в контроллер Atmega328.
12. Запуск робота

Мини робот на Arduino — готов к движению. Robot Wally
Можно осуществить первый, пока ещё пробный запуск нашего робота. У нас робот поехал не правильно, одно колесо крутилось правильно, а другое в противоположную сторону. Пришлось менять полярность проводов двигателя на колодке M2. Зато потом наш маленький робот с честью справлялся со всеми углами и препятствиями комнаты.
Эту статью я посвящаю всем новичкам, которые решили изучать Arduino. Дальнейшее изучение можно продолжать начиная с первого урока, - мигание светодиодом. Материал с роботом, это очень интересно, и чтобы заинтересовать вас, я решил начать именно с того как построить робота объезжающего препятствия. Дальнейшее будет намного проще, и пойдет как по маслу. Этот робот действительно работает. Всем удачи!
P.S. Это был достаточно вольный перевод статьи найденной, когда-то давно, на бескрайних просторах интернет, больше конечно отсебятины, т.к всё делалось по новой, рисунки доработаны, ссылок на источник нет, потому как документ был вордовский.
Доброго времени суток! Перед вами, дорогие , арт-робот, который может разрисовывать различные сферические или яйцевидные предметы размером от 4 до 9 см.
Для его изготовления понадобится 3D-принтер, набор стандартных инструментов + Arduino.

Примечание: Не стоит ставить крест на проектах, в которых используются 3D-принтер. При желании всегда можно найти место или способ, где можно заказать печать необходимых для проекта деталей.
Шаг 1: Немного о роботе

Арт-робот — двухосевая самоделка , которая может наносить рисунок на большинстве сферических поверхностей. Робот настраивается под определённый тип предмета (шары для пинг-понга, рождественские украшения, лампочки и яйца (утиные, гусиные, куриные …).

Для вращения сферического предмета и перемещения манипулятора используются высокоточные шаговые двигатели с высоким крутящим моментом, а для подъёма механизма ручки — тихий и надежный сервопривод SG90.
Шаг 2: Необходимые детали

Для того, чтобы сделать поделку своими руками нам понадобится:
- 2x подшипника 623;
- Шпилька диаметром 3 мм и длиной 80-90 мм;
- 1x пружина (длиной 10 мм и диаметром 4,5 мм);
- 2x шаговых двигателя NEMA 17 (крутящий момент 4,4 кг / см);
- Кабели для двигателей (длиной 14 + 70 см);
- USB-кабель;
- 1x сервопривод SG90;
- Arduino Leonardo;
- shield JJRobots;

- 2xA4988 драйвера для шаговых двигателей;
- Блок питания 12В / 2A;
- 11x винтов M3 6 мм;
- 4x винта M3 16 мм;
- 4x гайки M3;
- 2x 20-мм присоски;
- 1x гайка-барашек M3;
- 1x маркер;

Шаг 3: Общая схема

В качестве «шпаргалки» можете воспользоваться данной схемой.
Шаг 4: Давайте начинать!

Робот двигает манипулятором, с закрепленным на нём маркером, что приводится в действие шаговым двигателем. Другой шаговый двигатель отвечает за поворот объекта, на который наносится рисунок (яйцо, шарик …). Для удерживания предмета на месте используются две присоски: одна, прикрепленная к шаговому двигателю, а другая на противоположной стороне предмета. Маленькая пружина будет давить на присоску, помогая ей удерживать предмет. Для поднятия/опускания маркера используется сервопривод SG90.
Шаг 5: Манипулятор




Установим гайку в отверстие, подготовленное для неё и закрутим 16 мм винт. Сделаем то же самое для держателя предметов (справа на изображении выше). При создании шарнира для манипулятора использовались 2 16 мм винта. Этот шарнир должен свободно вращаться после закручивания винтов.



Шаг 6: Присоски

Установим одну из присосок внутрь отверстия в держателе предметов.
Шаг 7: Крепление шаговых двигателей

Закрепим оба шаговых двигателя к основной раме с помощью 8-ми винтов.


Шаг 8: Ось вращения

Разместим все элементы, как показано на изображении выше.
- Присоска;
- Гайка;
- Верхняя часть;
- Пружина;
- Подшипник 623 (должен быть встроен в левую чашку);
- Левая чашка;
- Свободное пространство для основной рамы;
- Правая чашка;
- Подшипник 623;
- Разделительное кольцо;
- Гайка-барашек (M3).

Шаг 9: Размещаем все по своим местам

Вставим собранный манипулятор на ось шагового двигателя.

Установим левую опору на ось шагового двигателя.

Маркер и яйцо установлены в качестве примера (сейчас размещать их не нужно).

ПРИМЕЧАНИЕ: Сервопривод потребует корректировок. Нужно будет повторно установить его угол во время процесса калибровки.


Шаг 10: Электроника
Закрепим электронику на тыльной стороне основной рамы с помощью винтов (2-х будет достаточно).

Подключим кабеля.

Если вы перепутаете полярности при подключении шаговых двигателей, то они будут просто вращаться в противоположном направлении, но с сервоприводом ситуация будет не такой уж и безобидной! Поэтому дважды проверяйте полярность перед подключением!

Шаг 11: Программирование Arduino Leonardo
Запрограммируем Arduino Leonardo с помощью программной среды Arduino IDE (v 1.8.1).
- Загрузим Arduino IDE (v 1.8.1) и установим программу;
- Запустим программное обеспечение. Выберем плату Arduino Leonardo и соответствующий COM-ПОРТ в меню «tools-> board»;
- Откроем и загрузим код Sphere-O-Bot. Распакуем все файлы внутрь одной папки и назовём её «Ejjduino_ARDUINO».
Шаг 12: Арт-робот готов к созданию произведений искусства

Шаг 13: Управление роботом

Программное обеспечение Inkscape. Загрузим и установим программное обеспечение Inkscape (рекомендую стабильную версию 0.91).
Загрузим и установим расширение EggBot Control (версия 2.4.0 была полностью протестирована).

Расширение EggBot Control для Inkscape — это инструмент, который необходимо использовать при тестировании и калибровке EggBot, а также перенесении рисунки на яйцо. Сначала нужно запустить Inkscape. После запуска Inkscape появится меню «Расширения», а в нём уже нужно выбрать подменю «Eggbot». Если не видите подменю Eggbot, то вы неправильно установили расширения. Выполните резервное копирование и внимательно следуйте инструкциям по установке расширений.
На этом всё, спасибо за внимание!)

 Настройка и подключение приставки цифрового телевидения
Настройка и подключение приставки цифрового телевидения Настройка и подключение приставки цифрового телевидения
Настройка и подключение приставки цифрового телевидения Беспроводная акустика JBL GO Black (JBLGOBLK) - Отзывы Внешний вид и элементы управления
Беспроводная акустика JBL GO Black (JBLGOBLK) - Отзывы Внешний вид и элементы управления Виртуальный компьютерный музей Dx связь
Виртуальный компьютерный музей Dx связь